Global Path Planning in a Digital-Twin
 Global Path Planning in a Digital Twin
Global Path Planning in a Digital Twin
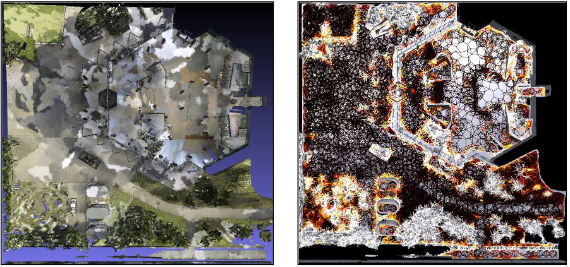
The global path planning problem focuses on finding a safe and short path for the robot to traverse between two places in the world. A Digital-Twin of the real-world represents most of the information required for path planning. In this thesis we present methods that use the Digital-Twin of the environment as a prior and build navigation graphs. These navigation graphs are used for real-time path planning during robots’ autonomous operation. First, we show a simulation based approach that builds a navigation graph on a large triangular mesh of an environment. We also show planned paths of more than 100m in length, spanning indoor and out- door terrains, and passing through multiple floors. Second, we propose a deep learning-based navigation cost predictor from the point-cloud data. This trained cost predictor can be used to build the navigation graphs an order of magnitude faster than the simulation-based approach. We also demonstrate that how our point-cloud-based navigation cost predictor helps in real-time global re-planning to handle large static map changes.